© Fort Street High School Robotics
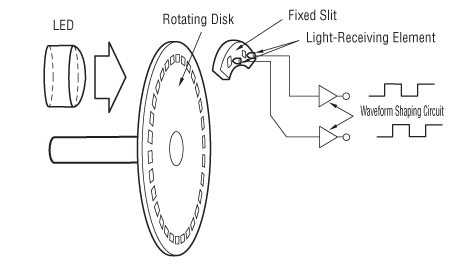
A motor encoder is a device built in to the motor that converts the position of rotation of the motor into data. Physically, it is a disk with many gaps – and a laser counts the number of gaps that have passed by a point. This determines how many degrees a motor has turned.
The NXT motors let you read the motor encoder values as if it was a sensor or a motor:
nxtDisplayTextLine(1, "%d", nMotorEncoder[motorLeft]); // show on screen the rotation 'count'
nMotorEncoder[motorLeft] = 0; // reset the count
This motor encoder value is very useful!
-
It is more accurate than wait – if you want to traverse half a metre, the rotation count will be constant. If you use wait, it depends on how fast the wheels are moving – which can change if you have low battery.
-
It lets your movements be more precise – you can turn exactly 180 degrees if you wanted to. Motor encoders are generally very accurate.
Sample program
#pragma config(Motor, motorA, motorL, tmotorNXT, PIDControl, encoder)
#pragma config(Motor, motorB, motorR, tmotorNXT, PIDControl, encoder)
//*!!Code automatically generated by 'ROBOTC' configuration wizard !!*//
task main() {
nMotorEncoder[motorL] = 0; // reset the encoder
while(nMotorEncoder[motorL] < 3000) { // keep running until encoder hits exactly 3000
motor[motorL] = 100;
motor[motorR] = -100; // rotate the robot around clockwise
}
// stop the robot
motor[motorL] = 0;
motor[motorR] = 0;
}